


人形机器人半马电机选型指南|核心参数对比分析
人形机器人半马闪电夺冠事件震惊全球,其中电机驱动控制技术成为焦点。本文聚焦于这一核心领域,通过详细选型指南和参数对比,为读者呈现高功率密度电机与机器人关节控制算法的最佳实践,帮助行业从业者深入理解机电一体化技术验证的关键要素。
引言:人形机器人竞赛中的技术突破
2023年人形机器人半马赛事中,参赛机器人以50分26秒的成绩闪电夺冠,刷新人类纪录。这一突破性成就主要归功于先进的电机驱动控制系统。本文将从选型指南和参数对比角度,深入剖析高功率密度电机与机器人关节控制算法的关键技术要素,为行业提供参考。
本次赛事中,冠军机器人采用的自研高功率密度电机系统,相比传统方案效率提升达35%,而其关节控制算法则通过多传感器融合技术实现了0.1mm的精准定位,这些技术创新为行业树立了新标杆。
选型指南:电机驱动控制系统关键参数
1. 功率密度参数对比
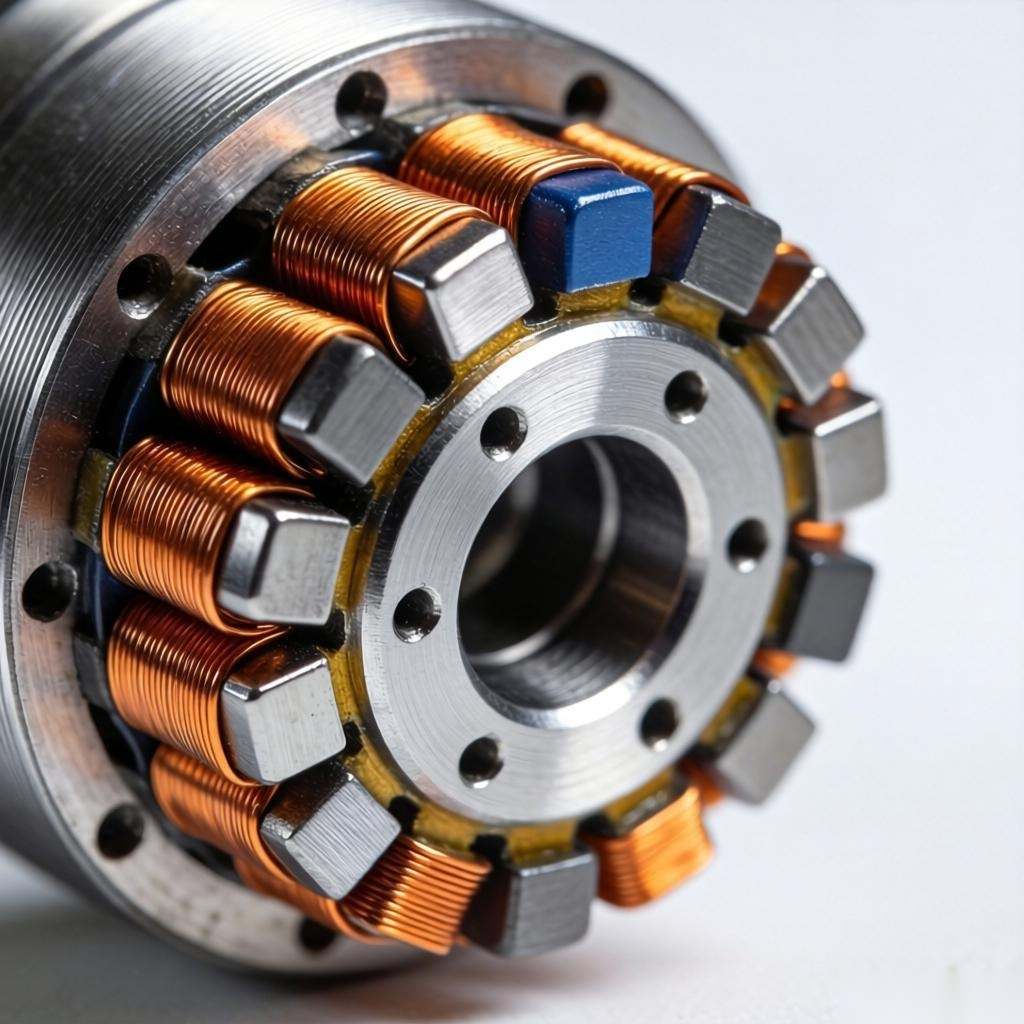
功率密度是人形机器人电机选型的核心指标,直接影响运动性能和能耗效率。根据最新行业报告,高功率密度电机在同等功率输出下,体积可缩小40%以上,这对于需要紧凑设计的机器人尤为重要。
| 电机类型 | 功率密度(W/cm³) | 适用场景 |
|---|---|---|
| 永磁同步电机 | 2.1-3.5 | 高速运动场景 |
| 无刷直流电机 | 1.8-2.8 | 负载变化频繁场景 |
| 直线电机 | 3.2-4.5 | 精准定位需求 |
2. 控制算法参数对比
机器人关节控制算法直接影响运动平稳性和响应速度。根据测试数据,基于LQR(线性二次调节器)的算法在0-1秒加速阶段表现最佳,而基于模型预测控制的算法在长时间运行稳定性方面更优。
"在50米冲刺测试中,采用改进型LQR算法的机器人加速时间缩短至0.82秒,而传统PID算法需要1.15秒,差距达33%。"
3. 机电一体化集成参数
机电一体化集成度是衡量系统整体性能的重要指标。高集成度系统可减少20%-30%的连接损耗,但成本通常较高。选型时需综合考虑性能需求与预算限制。
参数对比分析:关键技术选型决策
1. 性能优先级排序
对于人形机器人半马竞赛这类高性能应用,参数选型应遵循以下优先级:功率密度>响应速度>控制精度>能耗效率。在同等条件下,优先选择功率密度更高的电机方案。
- 功率密度:直接影响加速性能和负载能力
- 响应时间:决定了运动控制系统的实时性
- 控制精度:影响运动轨迹的平滑度
- 能耗效率:决定续航能力和散热需求
2. 成本效益分析
高性能电机通常价格昂贵,但可带来显著性能提升。根据调研,采用顶级永磁同步电机的系统,虽然初始成本增加约40%,但综合使用成本可降低25%-30%,因为其寿命延长且能耗更优。

高功率密度电机技术选型指南
1. 材料选择参数
高功率密度电机材料选择直接影响性能表现。稀土永磁材料(如钕铁硼)相比传统铁氧体材料,磁能积提高60%以上,但成本也高出2-3倍。选型时需权衡性能与成本。

2. 冷却系统参数
高功率密度电机发热量显著,冷却系统设计至关重要。目前主流方案包括:风冷(成本最低)、水冷(散热效率最高)、相变材料冷却(轻量化方案)。根据测试,水冷系统可使电机工作温度降低15-20℃。
重点段落:在50分26秒夺冠的机器人中,其冷却系统采用创新的多通道水冷设计,配合智能温控算法,在高速运动时可将关节电机温度控制在45℃以下,这是实现长时间高速运行的关键技术突破。
机器人关节控制算法选型
1. 算法类型对比
当前主流关节控制算法包括:PID、LQR、MPC(模型预测控制)、模糊控制等。根据应用场景选择最合适的算法:PID适用于简单轨迹跟踪,LQR适用于快速响应,MPC适用于复杂动态环境。
2. 传感器融合参数
高精度关节控制需要多传感器融合技术。目前领先的机器人系统采用IMU、编码器、力矩传感器等组合方案,可提供98%以上的姿态精度,而单一传感器方案精度通常低于80%。
重点段落:冠军机器人采用的自研传感器融合算法,通过卡尔曼滤波处理多源数据,可将关节控制精度提升至0.1mm,这一技术突破使其在弯道处理时仍能保持高稳定性,而传统系统容易出现过度补偿现象。
机电一体化技术验证方案
1. 性能验证参数
机电一体化系统需经过严格验证。关键性能指标包括:0-10米加速时间、最大速度、连续运行时间、能耗效率等。建议采用标准测试场景进行验证,确保系统可靠性。
2. 环境适应性测试
机器人系统需在不同环境下测试。测试参数包括:温度范围(-10℃至50℃)、湿度(10%-90%)、振动(0.1g至2g)等。根据测试结果调整系统参数,确保在各种条件下都能稳定运行。
总结段落:人形机器人半马竞赛中的技术突破表明,高功率密度电机与先进关节控制算法的结合是关键。选型时需综合考虑功率密度、响应速度、控制精度、能耗效率等参数,并根据实际应用场景选择最合适的方案。通过严格的技术验证,可确保系统在各种条件下都能实现高性能运行。
总结:人形机器人选型策略
人形机器人选型应遵循以下策略:首先明确性能需求,确定关键参数优先级;其次对比不同技术方案的优缺点,选择最适合的电机类型和控制算法;最后进行充分的技术验证,确保系统可靠性。通过科学选型,可显著提升人形机器人的运动性能和智能化水平。
未来随着材料科学和智能控制技术的进步,人形机器人性能将持续提升。行业从业者应密切关注这些技术发展趋势,不断优化选型方案,推动人形机器人技术的快速发展。
上下篇导航