


示教学习机器人在复杂操作中的故障排查与维护策略全攻略
示教学习机器人的故障特点与挑战
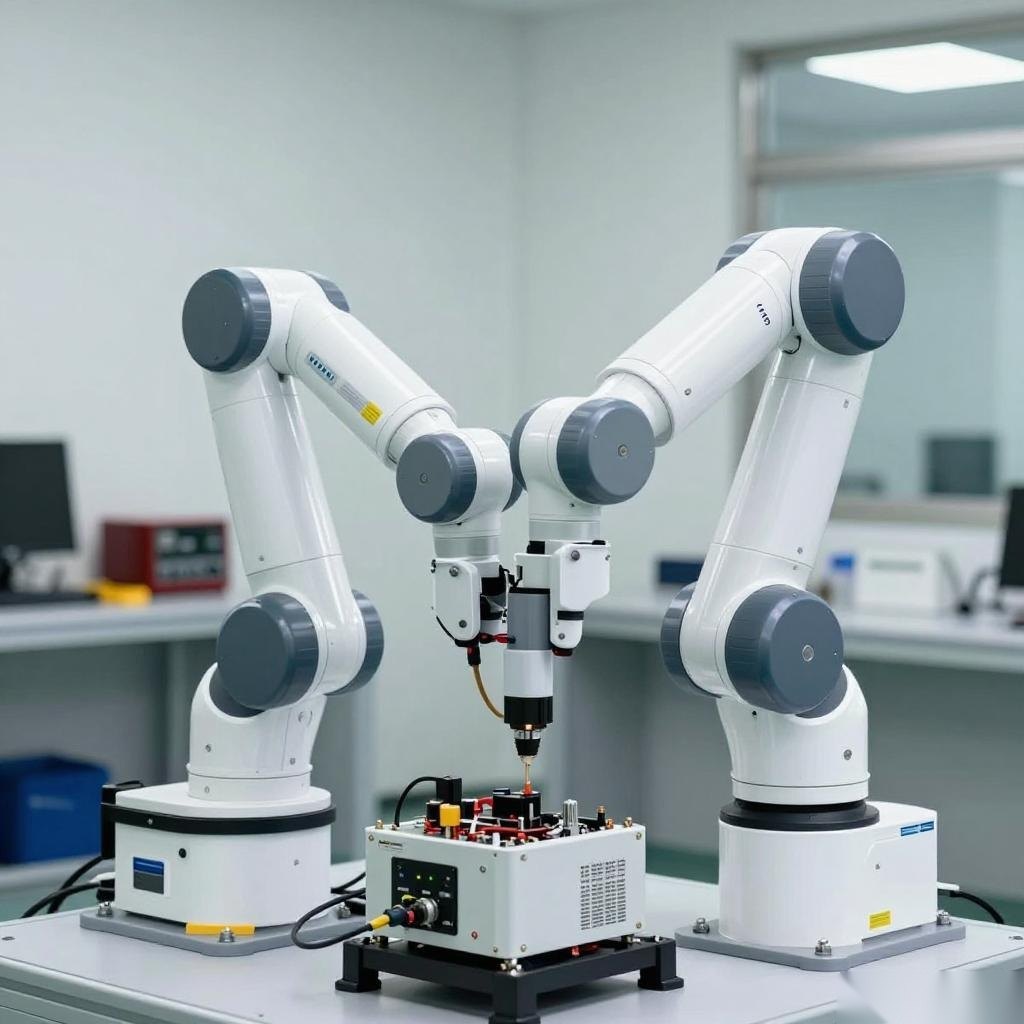
示教学习机器人在复杂操作任务中展现出强大的适应能力,但其复杂的控制系统和多模态感知机制也带来了新的故障排查挑战。首先,类神经机制控制系统的引入增加了系统调试的复杂性;其次,仿生视觉触觉传感系统的精确校准要求高;再者,人机协同遥操作模式下的通信稳定性直接影响系统可靠性。因此,建立有效的故障排查和维护保养机制至关重要。
在实际应用中,示教学习机器人的故障主要表现为:控制指令延迟、传感器数据异常、操作任务执行失败等。这些问题往往涉及硬件故障、软件冲突和环境干扰等多方面因素。例如,视觉传感系统可能因环境光线变化而出现误判。因此,系统化的故障排查流程是确保机器人稳定运行的关键。
故障排查方法与实践
硬件层面的故障诊断
硬件故障是示教学习机器人常见的问题之一,主要涉及传感器故障、执行器异常和通信接口问题。首先,需要定期检查仿生视觉触觉传感系统的状态,包括传感器的校准精度和数据传输稳定性。其次,对于执行机构的故障排查,可以通过监测电机的电流、电压和温度等参数来判断是否存在异常。此外,通信接口的稳定性直接影响人机协同遥操作的可靠性,因此需要重点检查数据传输的时延和丢包率。
| 故障类型 | 主要表现 | 排查方法 |
|---|---|---|
| 传感器故障 | 数据异常或缺失 | 检查传感器连接和校准状态 |
| 执行器异常 | 动作执行失败或不准确 | 监测电机参数和机械状态 |
软件层面的故障诊断
软件层面的故障主要涉及类神经机制控制算法的异常和系统集成问题。首先,需要检查控制算法的收敛性和稳定性,特别是在复杂操作任务中的适应性。其次,软件系统的日志记录和分析是定位问题的重要手段。此外,定期更新软件版本和优化算法参数也是预防软件故障的有效措施。


- 检查控制算法的收敛性和稳定性
- 分析系统日志定位异常
- 定期更新软件版本和优化参数
维护保养策略与实施
示教学习机器人的维护保养需要从硬件维护、软件更新和系统优化三个方面入手。首先,硬件维护包括定期清洁传感器、检查机械部件磨损情况以及确保通信接口的可靠性。其次,软件更新需要重点关注控制算法的改进和系统集成的优化。最后,系统优化涉及参数调优和性能测试,以确保机器人在复杂操作任务中的稳定性和可靠性。
定期维护是确保示教学习机器人长期稳定运行的关键。通过系统化的故障排查和维护保养,可以显著提升机器人的可靠性和操作精度。
总结与展望
综上所述,示教学习机器人的故障排查和维护保养是一个系统工程,需要从硬件、软件和系统集成多个层面入手。通过建立完善的维护机制和优化策略,可以有效提升机器人的可靠性和操作性能,为复杂操作任务提供强有力的支持。未来,随着人工智能和机器人技术的进一步发展,示教学习机器人的应用前景将更加广阔。
上下篇导航