


人形机器人半马竞赛背后的伺服电机选型与技术挑战|机电一体化设计指南
人形机器人半马竞赛背后的伺服电机选型与技术挑战
前言:人形机器人半马竞赛的背景与意义
最近,一场引人注目的竞赛——人形机器人半马比赛在科技界掀起了波澜。其中,闪电机器人以50分26秒的成绩夺冠,展示了人形机器人在运动能力上的巨大进步。本文将从应用场景和实际案例出发,探讨人形机器人半马竞赛背后的关键技术,特别是伺服电机选型和机电一体化设计的重要性。
人形机器人半马竞赛的技术挑战
人形机器人完成半马竞赛面临着诸多技术挑战,其中最关键的是运动控制的精确性和稳定性。这要求机器人具备高度协调的关节运动能力,而这背后离不开先进的伺服系统的支持。
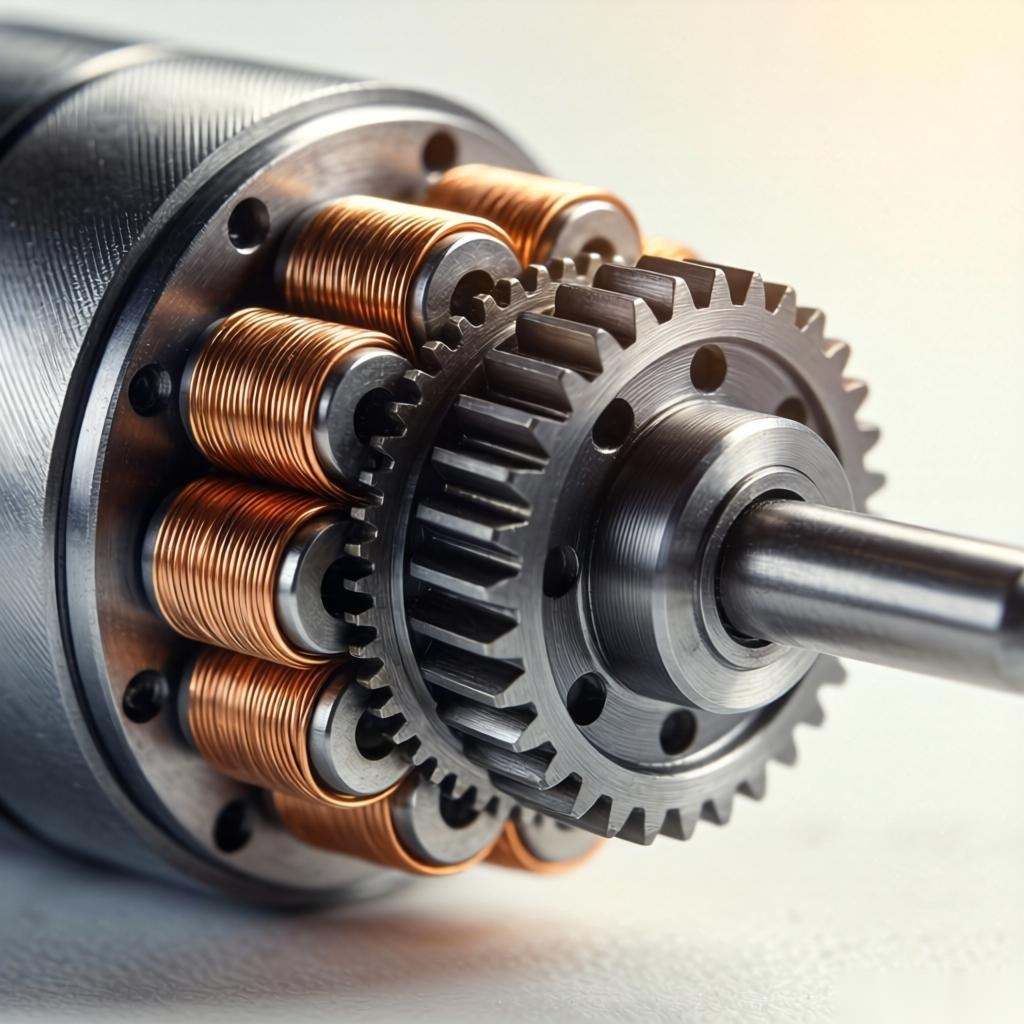
在人形机器人半马竞赛中,伺服电机的选型是决定机器人性能的关键因素之一。伺服电机需要具备高功率密度、快速响应和精确控制的特点,以满足机器人关节驱动的需求。此外,高精度编码器和先进的控制算法也是实现精确运动控制的必备条件。
闪电机器人夺冠的技术解析
闪电机器人以50分26秒的成绩夺冠,其成功离不开先进的伺服电机和机电一体化设计。根据公开资料,闪电机器人采用了高性能的伺服电机和优化的关节驱动方案,实现了出色的运动性能和稳定性。

- 高性能伺服电机:具备高转矩密度和快速响应的特点。
- 优化的关节驱动方案:通过精密的机械设计和先进的控制算法,实现关节运动的协调和稳定。
- 先进的机电一体化设计:实现了机械结构、电气系统和控制算法的高度集成。
伺服电机选型与机器人性能的关系
伺服电机的选型直接影响人形机器人的运动性能。在半马竞赛中,机器人需要在复杂地形上保持稳定的运动状态,这对伺服电机的精度和响应速度提出了极高的要求。
| 性能指标 | 技术要求 | 对机器人性能的影响 |
|---|---|---|
| 高功率密度 | 高转矩输出,小型化设计 | 增强运动能力,提高响应速度 |
| 高精度控制 | 精确编码器,先进控制算法 | 提高运动稳定性,实现精确控制 |
因此,在人形机器人半马竞赛中,伺服电机的选型和机电一体化设计是实现优异性能的关键。通过选用高性能伺服电机和优化关节驱动方案,可以显著提升机器人的运动能力和稳定性。
总结与展望
人形机器人半马竞赛展示了机器人技术在运动控制领域的巨大进步。闪电机器人50分26秒的夺冠成绩,离不开先进的伺服电机和机电一体化设计。未来,随着技术的不断进步,人形机器人在更多应用场景中将展现出更大的潜力。
人形机器人的发展不仅推动了机器人技术的进步,也为未来机器人应用开辟了新的可能性。
上下篇导航